Good Electrical Practices
Hot Glue & Zip Ties
Hot glue should be used pretty much everywhere that has some sort detachable electrical connection, excluding the PDH. Zip ties should be used to secure wires down to the robot's frame so they can't freely move at all.
If you don't have anything to zip tie to, you can use zip tie anchors, just make sure the adhesive is strong and relatively new.
- Hot glue can be used to add extra security to wires plugged into a VRM or similar.
- Hot glue can be used to secure WAGOs and other small electrical components to the robot frame if needed. Try to only glue plastic items if you can, though.
DIO/PWM/RoboRIO Ports
The RoboRIO has poor security for DIO and PWM devices, as they lack any sort of locking mechanism. Because of this, you should smother the outside of these connections with hot glue. You can see what this looks like below.
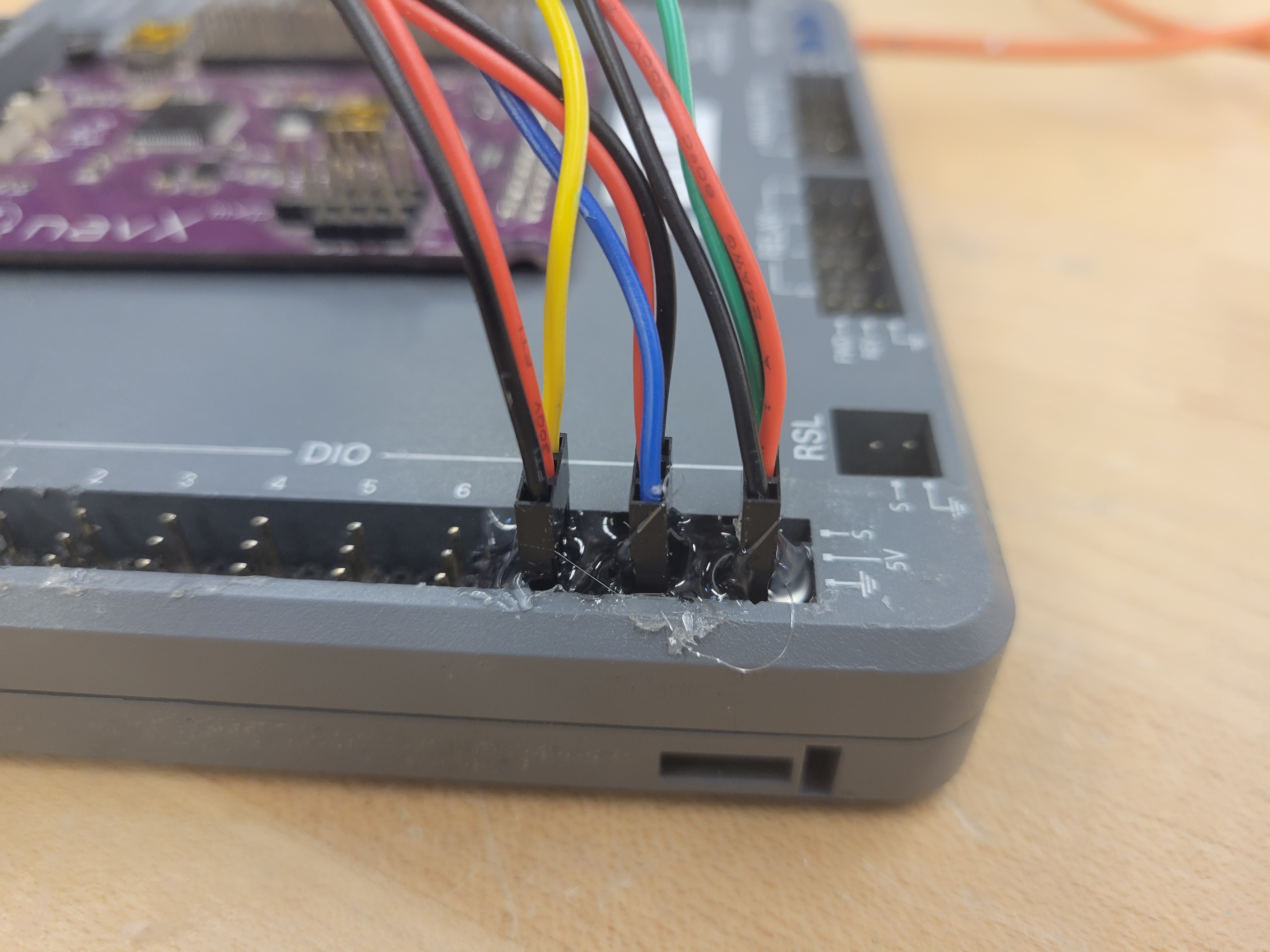
You should also label all DIO connections (near their connectors) with their ID and purpose, just in case any disconnects happen.
In addition to this, ALWAYS put tape over unused RoboRIO ports. Aluminum shavings are prone to falling into these gaps and shorting the RIO.
USB
If you have USB or USB-C connections on the robot, you can secure them down by gluing around the outside of the connection, seen below.

You must glue any USB connections for vital components (e.g. external batteries, CANivore), USB often doesn't have a strong locking system.
Ethernet
One thing I have learned about FRC electrical is that every single wire on your robot, no matter how secure you think it may be, can be disconnected with a hard enough impact. Ethernet is one of the more common disconnections that I've seen, and is vital in matches, so bring attention to it if there is any suspicion of an issue.
Every ethernet cable on the robot that is brought into competition should have hot glue under the tabs of its connectors. You can see what this looks like in the image below, but really you just put a small blob under the tab, locking it in place.
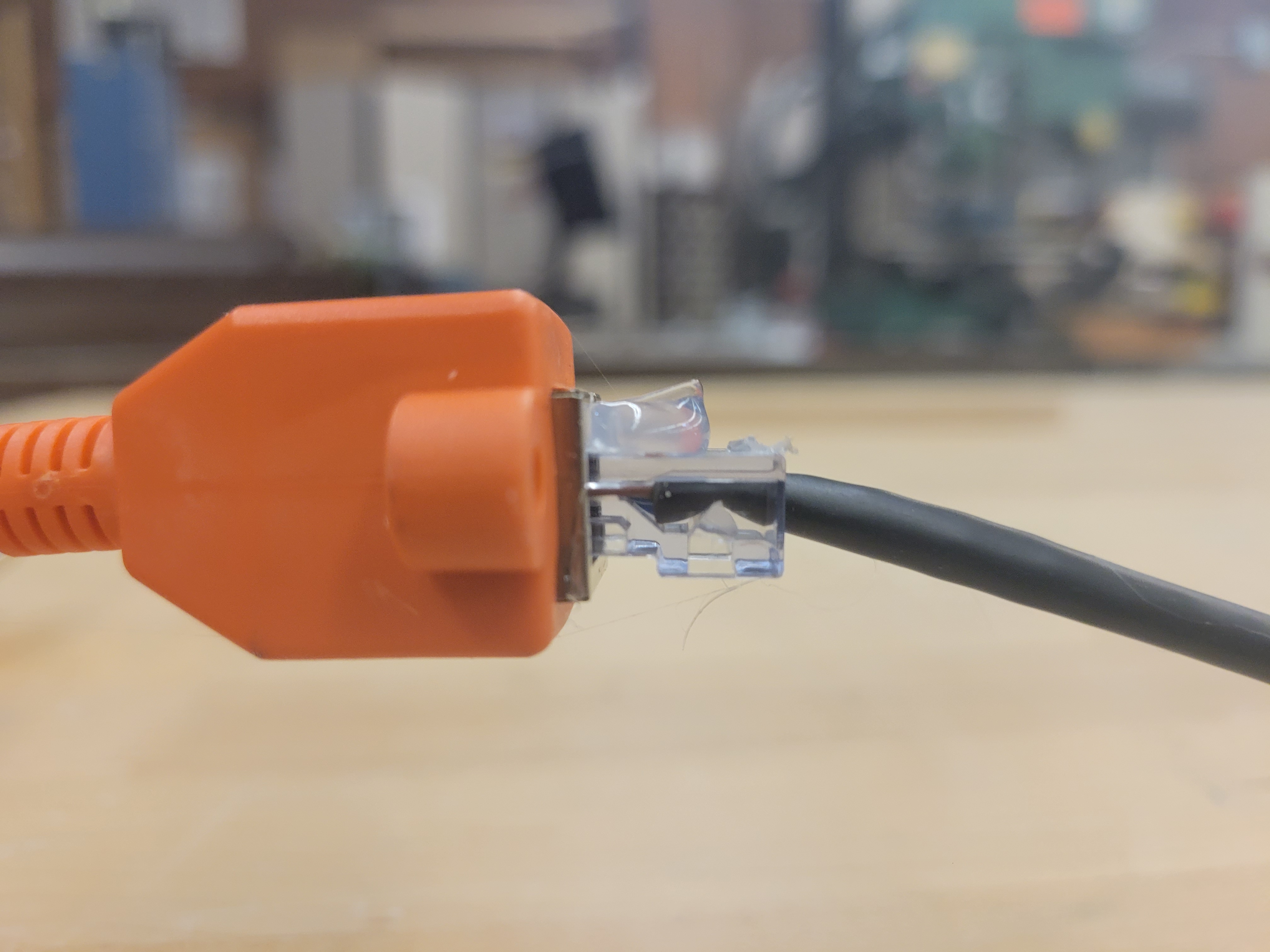
- Use an ethernet tester before using a cable on the robot to ensure internals are functional and channels aren't reversed.
- Secure cables close to the ports they plug into (probably with a zip tie). This will prevent accidental tugs from disconnecting ethernet.
- Cut the POE wire inside the ethernet cable connected between the RoboRIO and the VH-109. There is an issue where the VH-109 backfeeds power into the RoboRIO port, which can overheat it and cause issues.
Ordering CAN Devices
In the case of a CAN failure, it is essential to order can devices properly. Priority of operation should be the main factor of ordering CAN, as if a failure happens, it's more likely that you can control the most important subsystem(s). In addition to this, you want to set IDs on CAN devices to their position in the loop for easy troubleshooting.
Generally, this is what an organized loop looks like:
- RoboRIO or SystemCore
- Gyro (if using field-relative swerve, which is what you should be doing)
- Drivetrain (assuming swerve, do one module at a time, 2 motors and 1 encoder)
- Most Important Subsystem (likely the intake to shuttle or do minimal scoring, but depends on the robot and game)
- Other Subsystems (ordered by priority)
- PDH/PDP (has resistors to terminate the loop, can work without if there is a failure somewhere, but still very important)
Important Notes
- Any wires near an open hole in the bellypan should be secured down tight, but this is true for almost all parts of a robot. I have experienced multiple in-match failures as a student due to wires loosening, getting caught below the robot, and dragged along the floor.
- Some competitions may have static buildup on the competition field, which can cause electrical failures (e.g. 2024 PNW DCMP, was on a covered ice arena and multiple RIOs were fried). This is uncommon, but if you hear about teams having these issues, you can ground the robot by attaching a wire to the bellypan so it can drag on the carpet during matches.
- Always turn off the robot before unplugging the battery or doing any electrical work, mostly for your safety, but also for the robot's.